M i c r o p a s c a l / D e l p h i / 3 D П е ч а т ь
Posts tagged PIC
Логический элемент. (Logic)
1 год
by admin
in Без рубрики
Всем привет.
Делаю обзор данного устройства, в основном для того чтобы помнить, что было сделано такое устройство.
Встретился мне хороший человек, которому нужна была помощь. Помощь ему нужна была в плане сопряжения несколько устройств. В помещении стоит умная мойка для машин, которая моет машины и по завершению мытья машин нужно отрыть ворота. Вся загвоздка была в том, что электроника для ворот понимала определённый длинный импульс для открывания или закрывания ворот. А сама мойка выдавала просто короткий сигнал по завершению. На тот момент я принял решение пока поставить что было под рукой, это был (Авто ресет или можно назвать watch dogs). Само устройство выглядело как флэшка, но выполняла два условия, принимала входящий определенный сигнал и посылала дальше этот сигнал немного изменённый. После выполненной работы я решил взяться за своё придуманное устройство. Устройство должно было отвечать некоторым условиям:
- Быстро настроить на входящие сигналы
- Интуитивно понятный интерфейс
- Входное питание для устройства в большом диапазоне, не имея полярности
- Устойчивое к статике
- Устойчивое к перепадам влажности и температуры
- И высоким условиям стабильности
И высокие условия стабильности.
В устройстве применяется котроллер PIC18F914. Гарвардская архитектура восьмиразрядных микроконтроллеров PIC. Архитектурой вычислительного устройства называют совокупность свойств и характеристик, определяющих модель вычислительного устройства с точки зрения пользователя. Архитектура ВУ включает в себя его внутреннюю структуру и систему команд. Гарвардская архитектура означает разделение памяти на память программ и память данных, которые имеют свое адресное пространство. Высокая скорость выполнения команд в PIC-контроллерах достигается за счет использования двухшинной гарвардской архитектуры вместо традиционной одношинной фон-неймановской. Даже на личном опыте сам помню, когда начинал первые разработки своих устройств 20 лет назад, контроллеры этого семейства, выносили такие мои многочисленные ошибки что сам поражаюсь как это все работало.
Устойчивое к перепадам влажности и температуры
Покрываю плату лаком и стараюсь устанавливать обвязку, которая работает в большом диапазоне температуре окружающей среды.
Устойчивое к статике
На входе была использована схема с гальванической развязкой и защищена супрессором (SMBJ6V5CA).
Входное питание для устройства в большом диапазоне, не имея полярности
По питанию было применена схема на модуле LM2596 которая работает в диапазоне от 0 до 40 вольт.
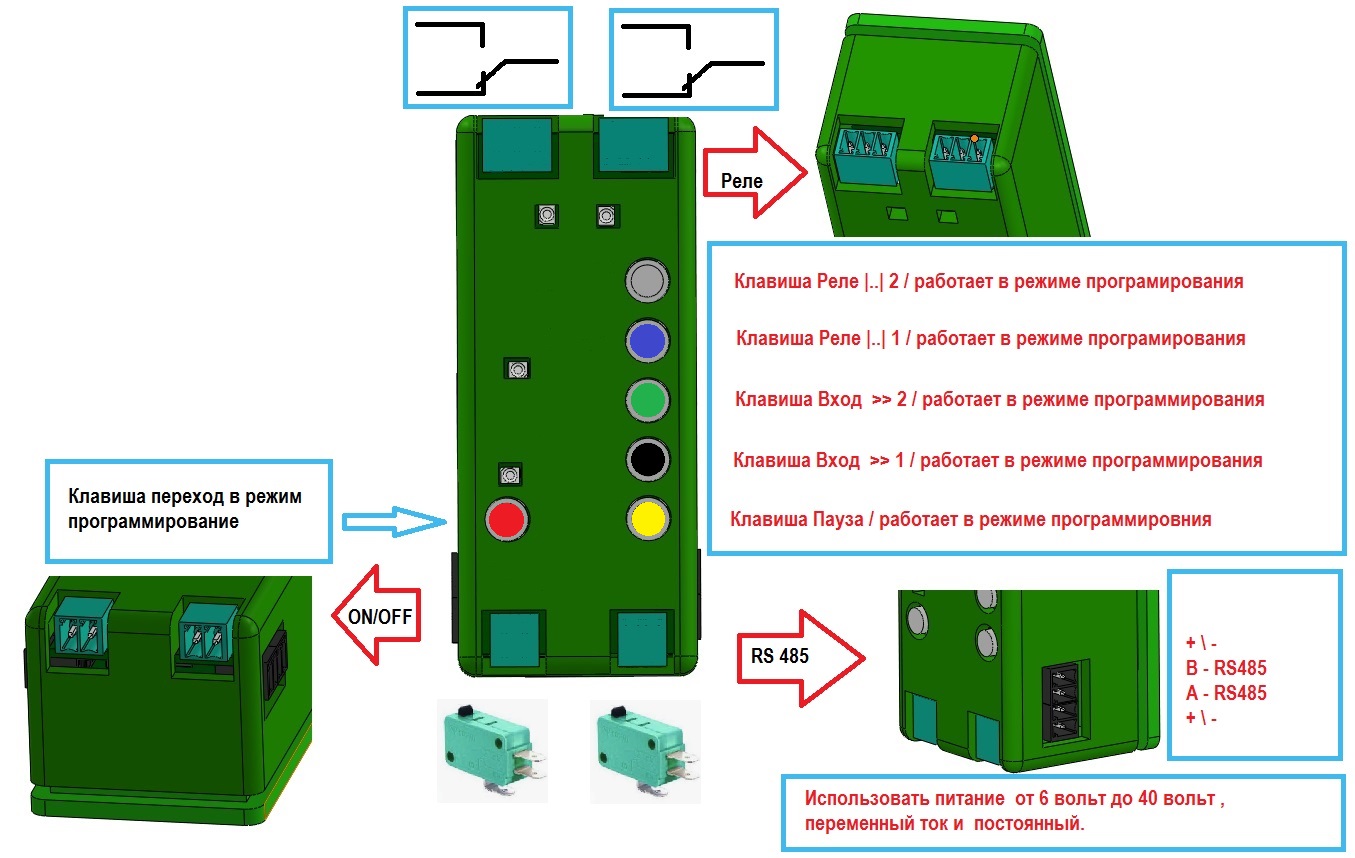
Интуитивное понятный интерфейс.
Здесь все просто, использовал только кнопки с разной цветовой маркировкой. И последующим нажатием кнопок.
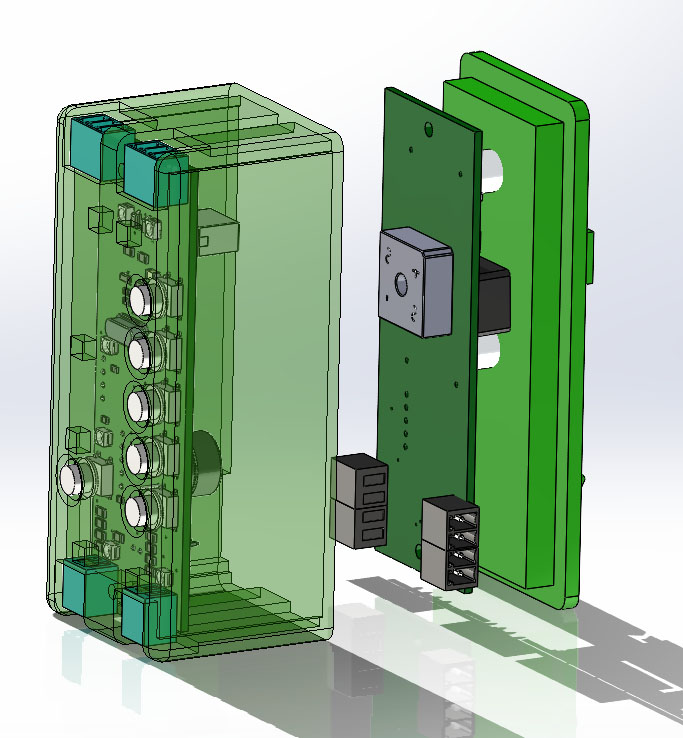
Корпус разрабатывал в solidworks под DIN реку, для удобства установки.

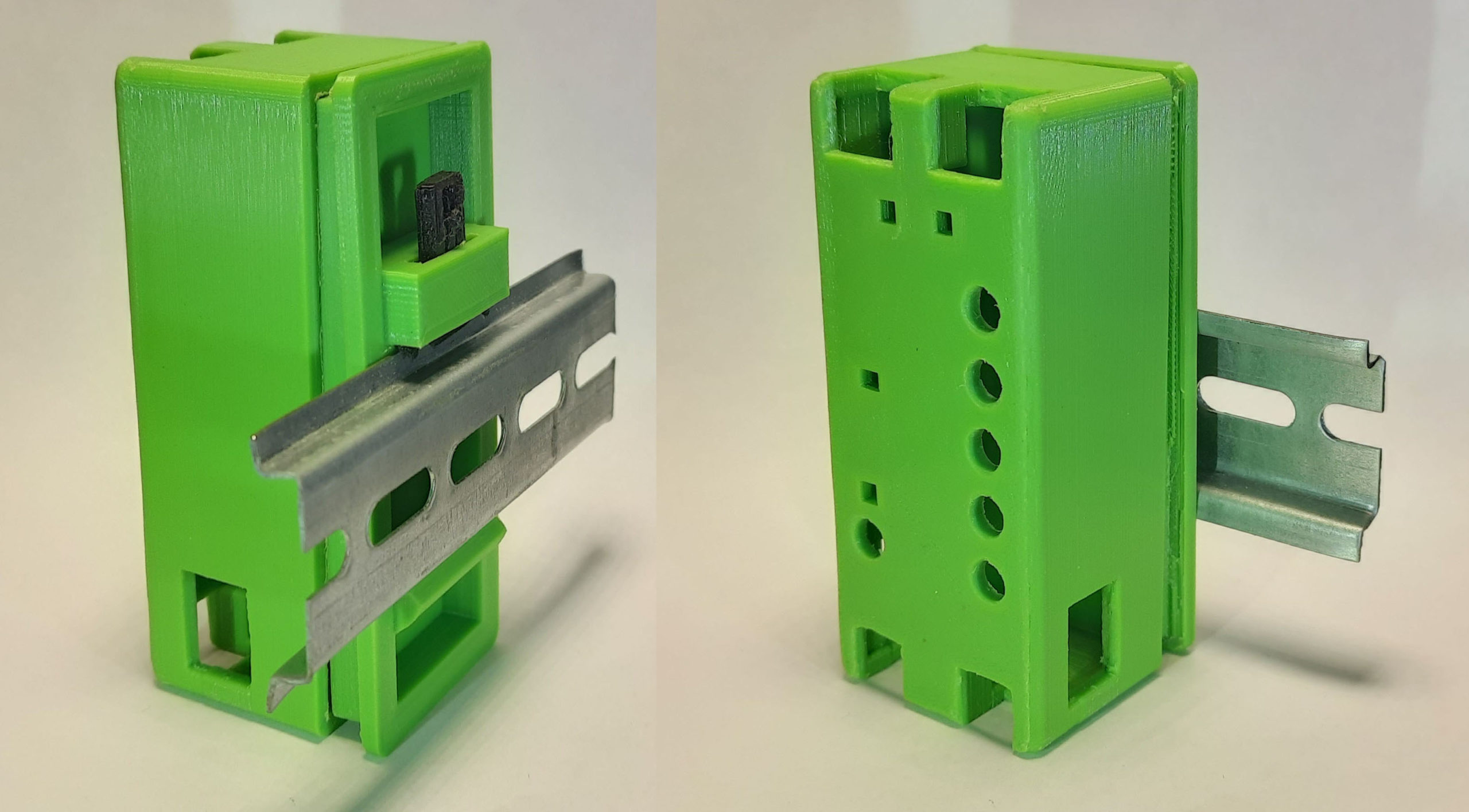
Печатал PET пластиком.
Разработка платы.
Разработку устройства поделил на две части:
- Процессор, интерфейс управления, входящий сигнал, исходящий сигнал
- Питание, и возможно в будущем разработка на RS485 интерфейсе связи.
Разработку оформлял DIPTRACE, кстати скачивая последнюю версию 15.01.2023, наткнулся на вирус на русификации, но старый русификатор прекрасно установился.
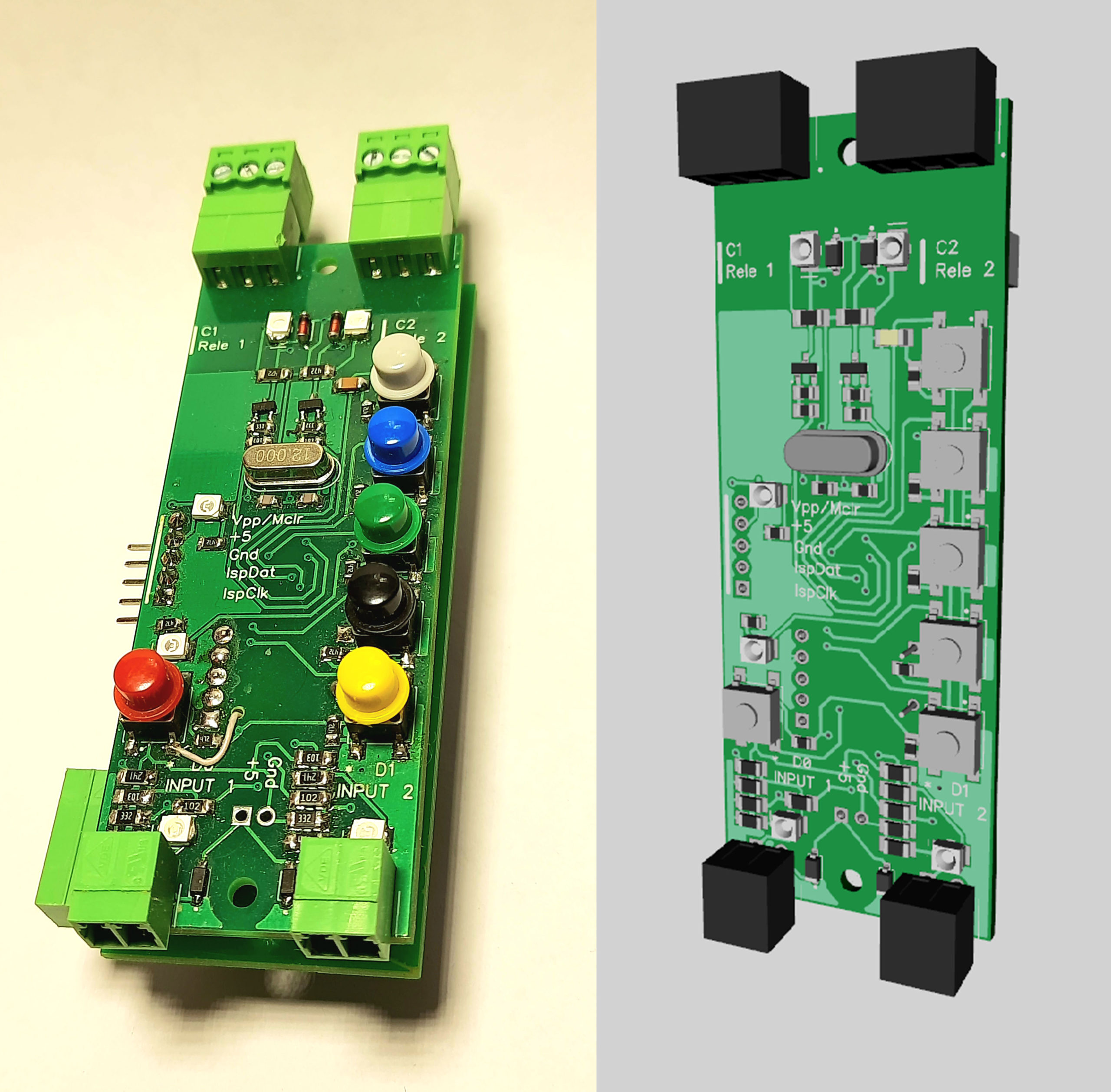
Конечно не обошлось без косяков, можно увидеть провод припаянный.
Обзор работы данного прибора будет в следящей статье.
Последняя и заключительная версия AutoReset .
06 лет
Заканчиваю доделывать свой текущий проект «AutoReset » , подвожу итоги и рассказываю что изменилось в последней версии . Начнем по порядку. Во первых хотелось рассказать что есть два режима «Деликатный» и «Агрессивный». Они отличаются друг от друга тем что:
Деликатный режим : В его режим работы входит , запись времени перезагрузки компьютера что в последующем можно вести статистику и наблюдать когда компьютер перезагружался. Записи времени хранятся в самом приборе и извлечь от туда их можно только через программу которая коннектится с прибором. В этом режиме не используется кнопка включения питания компьютера.
Принцип работы режима:
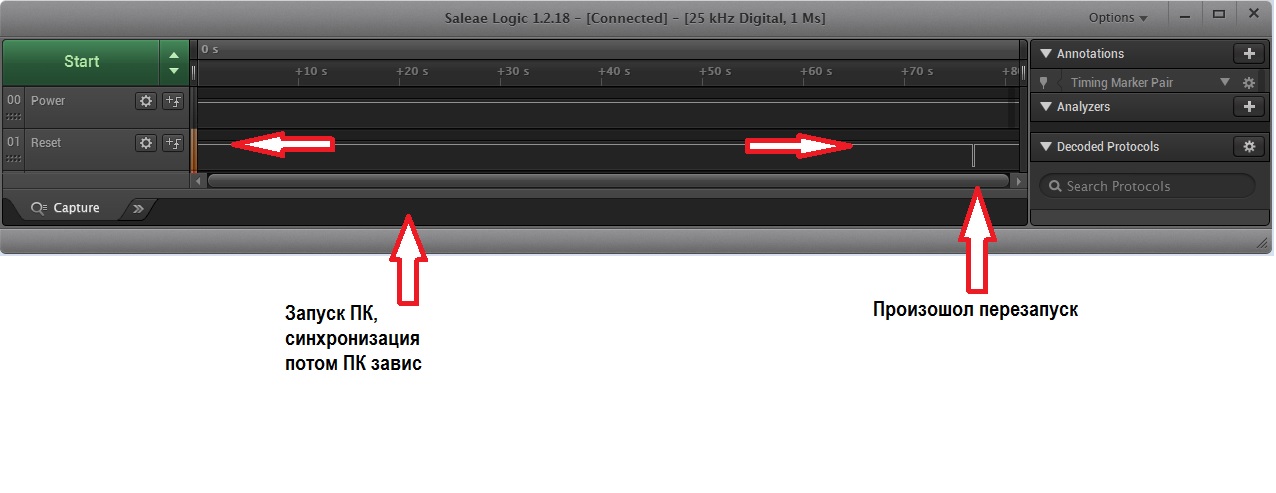
При включении компьютера прибор ожидает связи с программой. После синхронизации с программой прибор может сохранить в себе время перезапуска компьютера. Смоделируем такую ситуацию. Компьютер загрузился, прибор синхронизировался с компьютером, но компьютер завис и прибор потерял синхронизацию с программой.
Действия прибора : записывает последнее время сессии с компьютером и выполняет перезагрузку по установленным предустановкам и далее ожидает синхронизацию с программой.
Агрессивный режим : В этом режиме , отсутствует запись времени в прибор и прибор работает в циклическом режиме перезагрузки или до синхронизации с компьютером.
Принцип работы режима:
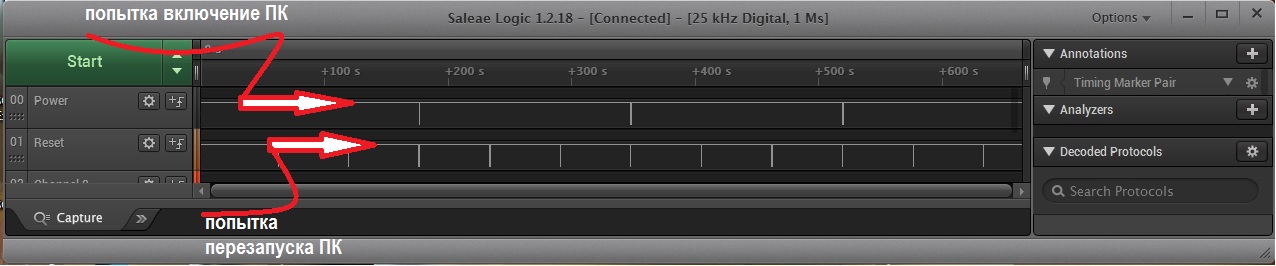
При включении компьютера, прибор запускает обратный отсчет времени для перезагрузки или включении компьютера, и также ожидает синхронизации с компьютером. Да прибор может использовать кнопку включения компьютера в этом режиме.
- Если синхронизация не произошла в установленный участок времени он повторяет действия по предустановленным настройкам в циклическом режиме или ожидает синхронизации с компьютером
- Если синхронизация с компьютером произошла он работает в режиме ожидания обрыва с компьютером
Все предустановки прибора выставляются через программу которая синхронизируется с прибором.
Продолжение следует…..
Авторесет.
06 лет
by admin
in Без рубрики
Представляю вам свой новый проект. Авто ресет или можно назвать watch dogs.
Устройство предназначено для удержания ПК в активном состоянии , то есть при зависании или сбое ПК прибор сделает РЕСТАРТ ПК.
 Устройство состоит из коробки с проводом USB и индикаторами обозначающими состояние прибора и еще провод для подключения к плате на ПИН (RESET). Сделана кнопка для эмуляции самой кнопки РЕСЕТ и для связи прибора с программой, у кнопки двойное предназначение в зависимости от текущего состояния прибора.
Устройство состоит из коробки с проводом USB и индикаторами обозначающими состояние прибора и еще провод для подключения к плате на ПИН (RESET). Сделана кнопка для эмуляции самой кнопки РЕСЕТ и для связи прибора с программой, у кнопки двойное предназначение в зависимости от текущего состояния прибора.
Всё устройство делалось под заказ , для одной организации которая занимается продажей комплектующих для ПК и соответственно еще и занимается сборкой ферм для майнинга. И требовалось устройство для удержания ПК в активном состоянии, но китайские поделки были не только дорогими но и неудобными по подключению. И нужно было сделать устройство чтоб было просто подключить к ПК и не запариваться с драйверами. Что и было сделано.
Начну по подробней.
Есть дополнение к прибору , это программа для WINDOSW.
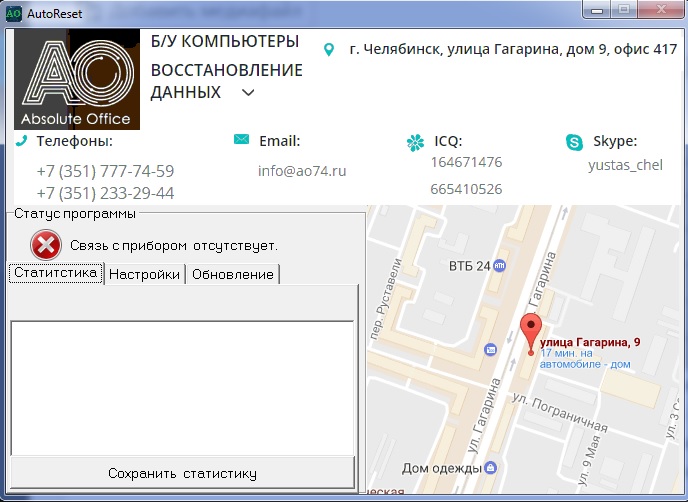
Программа выполняет связь с прибором по USB шнуру , при подключении прибора, активируется и начинает синхронизацию с прибором.
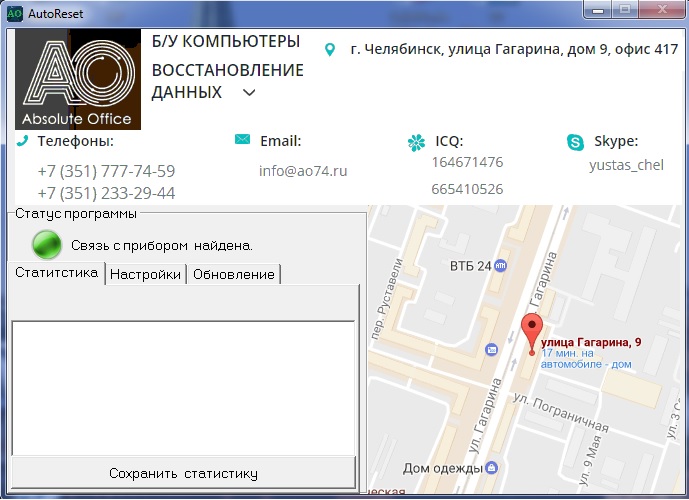
В закладке СТАТИСТИКА можно посмотреть время перезагрузок которые были записаны в самом приборе , записи о перезагрузках не хранятся на ПК эти записи хранит само устройство в своей памяти. Есть возможность записи удалить полностью или сохранить копию в файл на ПК.
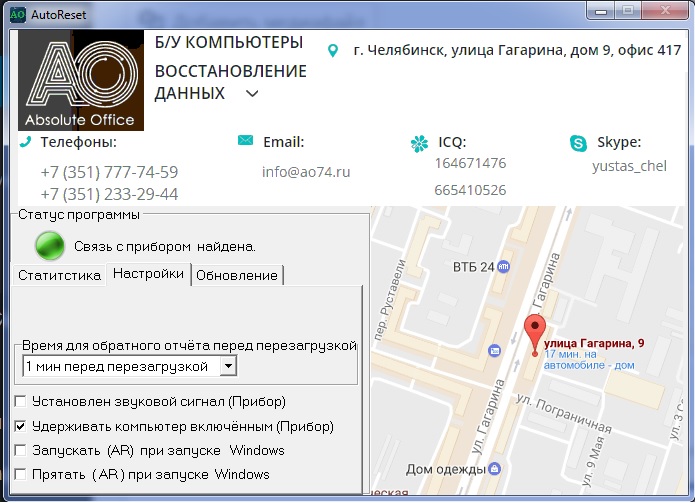
В закладке НАСТРОЙКИ можно увидеть установки для программы и прибора.
- Прятать (AR) при загрузке WINDOWS — данная опция делает запись в конфигурационный файл программы на ПК, что программа должна спрятаться в трэй при запуске WINDOWS.
- Запуск (AR) при запуске WINDOWS — данная опция делает запись в файл реестр WINDOSW , что программа будет загружаться автоматически при запуске операционной системы.
- Удержание компьютера включенным (Прибор) — данная опция делает запись в самом приборе , и при синхронизации прибора с программой устройство начинает отслеживать связь с программой. Если связь теряется то устройство начинает обратный отсчет для перезагрузки ПК.
- Установлен звуковой сигнал (Прибор) — данная опция делает запись в самом приборе что все действия сопровождаются звуковым сигналом из прибора , в приборе установлен зуммер который будет оповещать о обратном отсчете , перезагрузке ПК.
- Время для обратного отсчета перед перезагрузкой — предоставлено для индивидуальной установки обратного отсчета времени перед перезагрузкой ПК
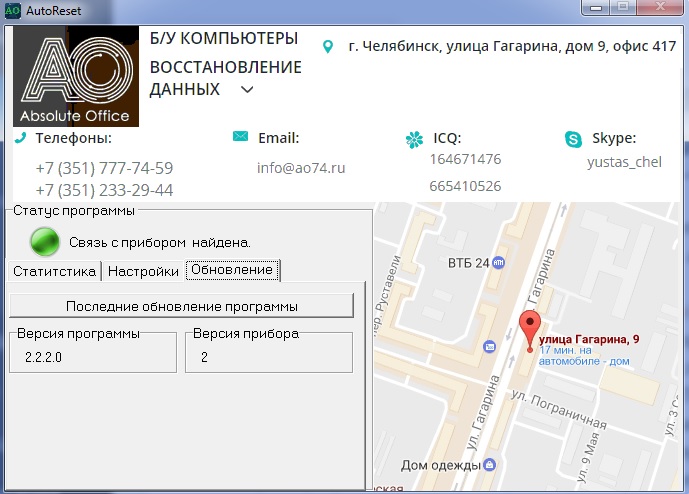
В закладке Обновление можно увидеть версию самой программы и версию прибора к которому подключено. При нажатии кнопки (Последние обновления программы) можно почитать последние новости обновлении программы.
Запуск и работа прибора с программой.
При подключении прибора первый раз к WINDOWS , вам нужно подождать некоторое время , для определения операционной системы данного устройства. Драйвера вам не нужно устанавливать, контроллер на котором сделан прибор определяется операционной системой как HID устройство и работает отлично на стандартных драйверах которые заложены в WINDOWS.
После можно запускать программу и делать индивидуальные настройки для своего пк.
Работа прибора и индикация .
-
- Зеленый индикатор —
- индикатор гори постоянно это означает синхронизация с программой установлена
- индикатор не гори это означает синхронизация с программой не установлена или программа просто не запущена
- индикатор моргает это означает синхронизация с программой установлена и включен режим удержания ПК включенным , если при обрыве в этот момент произойдет обрыв синхронизации прибора с программой будет запущен обратный отсчет для перезагрузки
- Красный индикатор — моргает это означает запущен обратный отсчет для перезагрузки
- Синий индикатор — горит тогда когда есть питание на приборе
- Желтый индикатор — горит это означает что в приборе есть записи о последних перезагрузках, их можно просмотреть во вкладке статистика.
- Зеленый индикатор —
Кнопка на приборе .
Кнопкой на приборе можно
- отменить режим удержания ПК, когда зеленый индикатор моргает
- закрыть программу для синхронизации , когда зеленый индикатор горит постоянно
- с эмулировать нажатие кнопки РЕСЕТ , когда зеленый индикатор и красный индикатор не горит
- отменить обратный отсчет для перезагрузки , когда моргает красный индикатор
PIC Bootloader для PIC18F45K22 от www.mikroe.com
07 лет
Всем привет.
Продолжаю рассказывать про развитие моей идеи с PIC18F45K22 и дешевыми цифровыми передатчиками NRF24L01. Существует программа загрузчик от компании mikroe.com .
Если присутствует загрузчик в процессоре , то не требуется программатор для перепрограммирование данного устройства , то есть идет удешевлении самого устройства.
pic_bootloader_v102.zip
Новая плата , старый проект. ПлатаPIC18F4(3..6)K22
07 лет
by admin
in Без рубрики
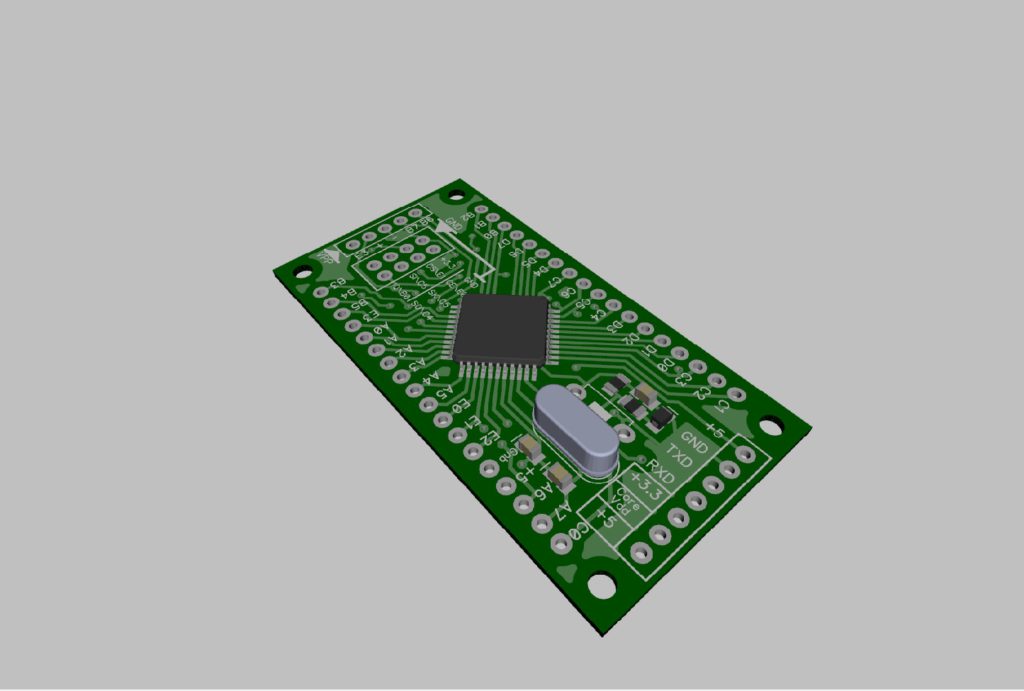
Всем привет , недавно заказал изготовление платы для процессоров серии PIC18F в корпусе TQFP 44. Проект старый, но давно хотел сделать.
Вот наконец то свершилось, подкопил немного денежек и заказ. Заказывал в pselectro.ru , я заказываю у них давно уже , и всегда меня не подводили. Качество плат на высоте. Если вам говорят что надо заполнять сложные формуляр и какие то документы сложные , это полный обман в пользу китайцев. Почему сейчас объясню. Если вы рисуете платы в каких либо таксировщиках, то просто не можете не знать, те термины которые у вас спрашивают для заполнения нескольких строк в бланке оформления.

Вот параметры платы
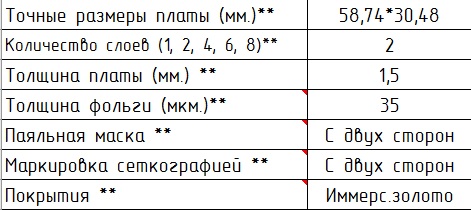
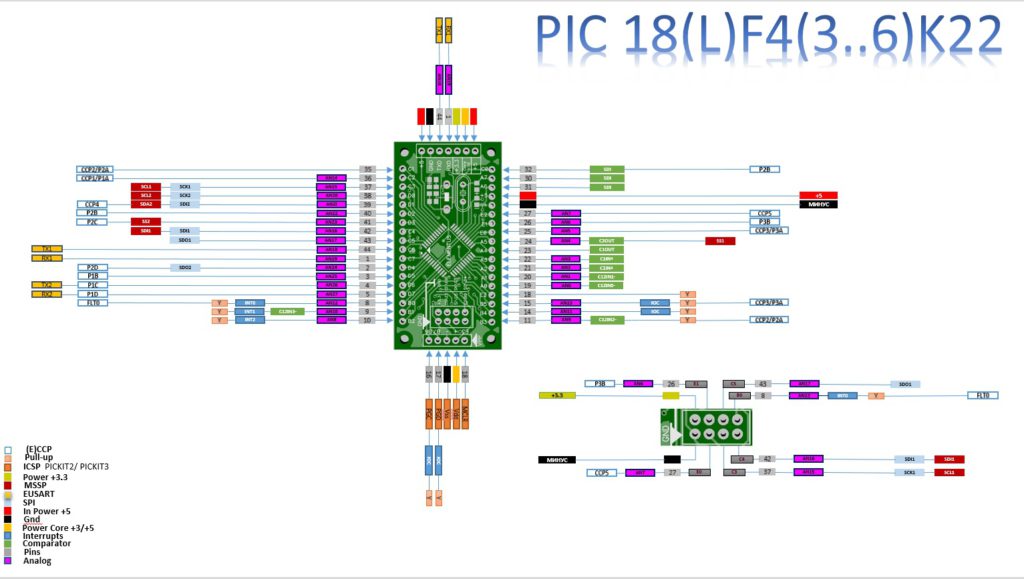
Плата сделана для контроллера PIC18F45K22. Ее можно использовать и для других процессоров из серии PIC18F, она подходит .
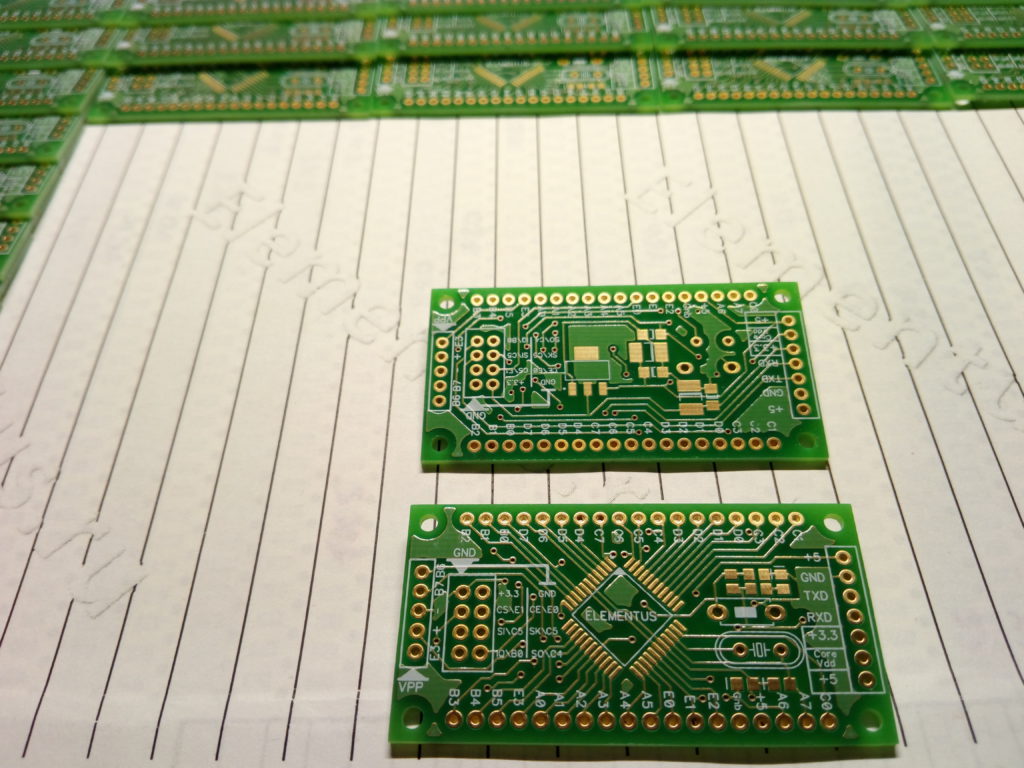
Отличительные особенности моей платы:
Отдельное питание для процессора, перемычкой вы сами выбираете какое будет питание у процессора. Можно выбрать внешнее или от стабилизатора который стоит у вас на плате. А также вы этой перемычкой можете отключить процессор от питания платы , для того чтоб запрограммировать внутрисхемно.
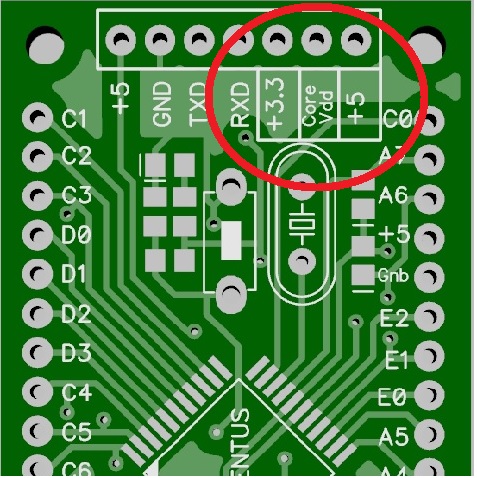
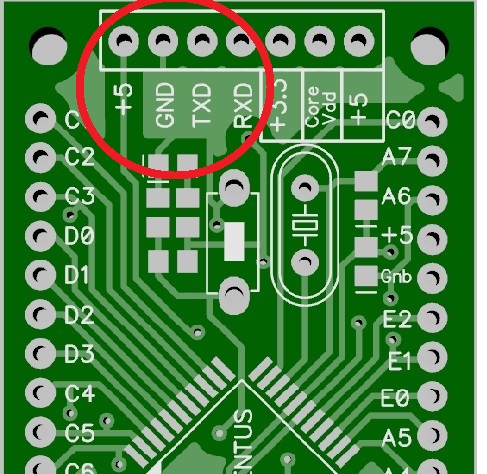
Сделаны выходы для UART1 , под плату CP2102 USB-UART.
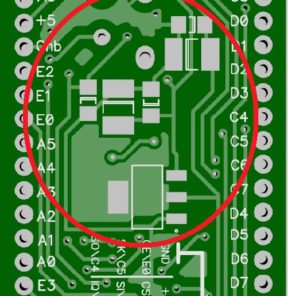
С лева индикатор питания, и цепочка резистора и конденсатора для процессора.
Посередине кнопка для сброса.
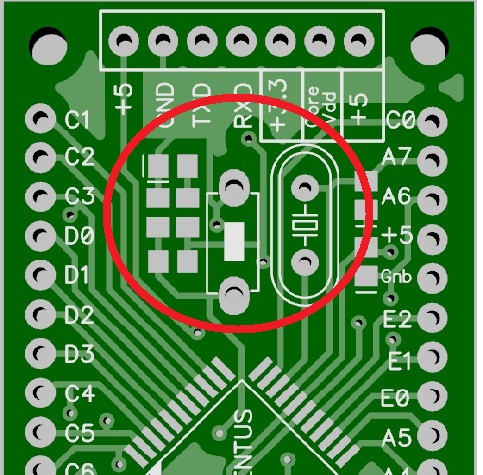
С права кварц с конденсаторами.
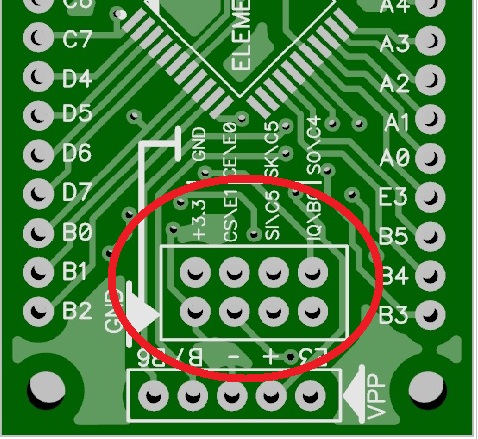
Сделан разъем для модуля NRF24L01, а также может являться SPI1 разъемом. Питание у этого разъема только от стабилизатора на плате.
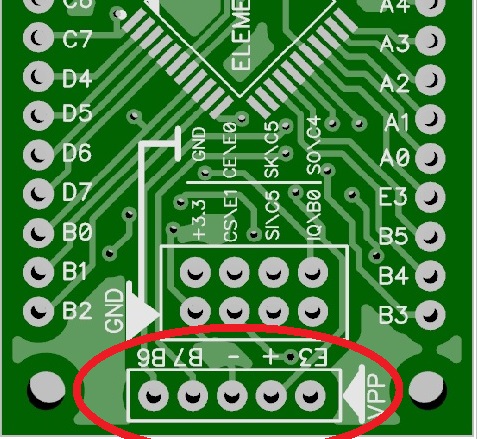 Есть разъем для программирования, для программатора PICKIT2/PICKIT3. Пины порта B6/B7 больше нигде не задействованы на внешних выходах.
Есть разъем для программирования, для программатора PICKIT2/PICKIT3. Пины порта B6/B7 больше нигде не задействованы на внешних выходах.
 Стабилизатор питания типа LD1117A33 корпус SOT223, на 3,3 вольта и немного конденсаторов для сглаживания напряжения питания. Можно поставить и любой стабилизатор на 5 вольт, тогда для процессора использовать, только тогда разъем SPI1 для NRF24L01 тоже будет иметь пин питания на 5 вольт, и джампер для выбора питания процессора использовать только для внутреннего питания процессора.
Стабилизатор питания типа LD1117A33 корпус SOT223, на 3,3 вольта и немного конденсаторов для сглаживания напряжения питания. Можно поставить и любой стабилизатор на 5 вольт, тогда для процессора использовать, только тогда разъем SPI1 для NRF24L01 тоже будет иметь пин питания на 5 вольт, и джампер для выбора питания процессора использовать только для внутреннего питания процессора.
Есть карта обзора на плату.
GSM Выключатель.
012 лет
by admin
in Без рубрики
Доделал GSM выключатель.
Все рассказы в видео, смотрите и слушайте.


Потайная комната на 485 интерфейсе.
012 лет
by admin
in Без рубрики
Открываю ещё одну мою задумку, уже работает на половину, потому как программа которую я сегодня опробовал работает на моем железе.
Заметьте, что я использую только свои платы, которые сам придумал, они работают в моем старом проекте, который называется (Болванка для домашних поделок на PIC).
На нём будет сделана основная масса моих идей, которые я хочу реализовать в дальнейшем.
Объясняю, что хочу сейчас сделать.
Сеть устройств, связных на протоколе RS485, котороя будет собирать информацию о текущей обстановке квартиры. Наблюдать за температурой, задымления воздуха, хочу привязать управление за аквариумом, перемещением по комнатам, наблюдение за входной дверью. И при случае подавать СМС уведомления, а также хочу привязать управление квартирой через СМС.

Устройство (Мастер)


- будет управлять нагрузкой на подсветку на светодиодах
- будет иметь часы реального времени (ds1307 или аналоге)
- управлять включением кнопки моего основного компьютера ( для удобства)
- управлять включением кнопки моего хранилища данный (старый винт на 32 гига. туда скидываю важную инфу. иногда приходиться включать)
- управлять включением кнопки переноски (там висят паяльная станция и ещё куча приборов)
- принимать команды от GSM модема
- следить за RFID приставкой (если потребуется закрыть комнату на электронный ключ, а то ребёнок достает уже до ручки и умеет открывать дверь )
Уже собрано устройство ( SLAVE пульт), весит у меня прямо над монитором, чтобы не тянуться до компа, под стол и в остальные места.

Тестирую RS-485 и “LV-32MX v6” + “EasyPIC5”
013 лет
by admin
in Без рубрики
И вот я снова со своими бредовыми идеями. По случаю недавней моей покупки платы “ LV-32MX v6 Development System” от фирмы “MikroElektronika”. Я решил соединить две свои платы “LV-32MX v6” + “EasyPIC5” интерфейсом RS-485. Прикупил AD485, нарисовал плату и всё это запаял. Фотки платы прелогается.


Взял несколько примеров уже написанных у “MikroElektronika” , немного их подправил и вот что получилось.
PIC CHIP Robot Tank
014 лет
by admin
in Электроника

Наткнулся тут на одну поделку, блин я тоже хочу так сделать.
И скоро руки у меня дойдут до неё.
Выменял серво привод у DI HALT не давно .
